1. Pengertian Robotika
Istilah
robot berawal bahasa Cheko robota yang berarti pekerja yang tidak mengenal
lelah atau bosan. Sedangkan secara terminologi, arti yang paling tepat dengan
istilah robot mengandung pengertian System atau alat yang digunakan untuk
menggantikan kinerja manusia secara otomatis.
Robot yang dibuat manusia tidak boleh bertentangan dengan Laws of Robotics yang dikemukakan oleh Isaac Asimov. Di kalangan umum pengertian robot selalu dikaitkan dengan “makhluk hidup” berbentuk orang maupun binatang yang terbuat dari logam dan bertenaga listrik (mesin). Sementara itu dalam arti luas robot Adalah suatu alat yang dalam batas-batas tertentu dapat bekerja sendiri (otomatis) sesuai dengan perintah yang sudah diberikan oleh perancangnya. Dengan pengertian ini sangat erat hubungan antara robot dan otomatisasi sehingga dapat dipahami bahwa hampir setiap aktivitas kehidupan modern makin tergantung pada robot dan otomatisasi.
Robot yang dibuat manusia tidak boleh bertentangan dengan Laws of Robotics yang dikemukakan oleh Isaac Asimov. Di kalangan umum pengertian robot selalu dikaitkan dengan “makhluk hidup” berbentuk orang maupun binatang yang terbuat dari logam dan bertenaga listrik (mesin). Sementara itu dalam arti luas robot Adalah suatu alat yang dalam batas-batas tertentu dapat bekerja sendiri (otomatis) sesuai dengan perintah yang sudah diberikan oleh perancangnya. Dengan pengertian ini sangat erat hubungan antara robot dan otomatisasi sehingga dapat dipahami bahwa hampir setiap aktivitas kehidupan modern makin tergantung pada robot dan otomatisasi.

2.Sistem Mekanik Dalam Robot
Manipulator robot adalah sistem mekanik yang
menunjukkan pergerakan dari robot. mekanik ini terdiri dari susunan
link(rangka) dan joint (engsel) yang mampu menghasilkan gerakan yang
terkontrol. Hanya dua tipe dasar dari jenis yang digunakan pada industri yaitu:
• Revolute joint (R) yaitu perputaran pada sumbu tertentu
• Prismatic joint (P) yaitu pergeseran sepanjang sumbu tertentu
Dengan dua tipe joint di atas maka dapat dibuat manipulator dengan dua, tiga bahkan enam
derajat kebebasan adalah jumlah arah yang independen, dimana end effector (berupa griper/tool)
dapat bergerak.Secara umum struktur robot dapat dibedakan menurut sumbu koordinat yang digunakan, yaitu:
• Robot Kartesian yang terdiri dari 3 sumbu linier
• Robot Silindris yang terdiri dari 2 sumbu linier dan 1 sumbu rotasi
• Robot Spheris yang terdiri dari 1 sumbu linier dan 2 sumbu rotasi
• Robot Artikulasi yang terdiri dari 3 sumbu rotasi
• Revolute joint (R) yaitu perputaran pada sumbu tertentu
• Prismatic joint (P) yaitu pergeseran sepanjang sumbu tertentu
Dengan dua tipe joint di atas maka dapat dibuat manipulator dengan dua, tiga bahkan enam
derajat kebebasan adalah jumlah arah yang independen, dimana end effector (berupa griper/tool)
dapat bergerak.Secara umum struktur robot dapat dibedakan menurut sumbu koordinat yang digunakan, yaitu:
• Robot Kartesian yang terdiri dari 3 sumbu linier
• Robot Silindris yang terdiri dari 2 sumbu linier dan 1 sumbu rotasi
• Robot Spheris yang terdiri dari 1 sumbu linier dan 2 sumbu rotasi
• Robot Artikulasi yang terdiri dari 3 sumbu rotasi
3. Jenis-jenis Robot
a.
Robot Mobile
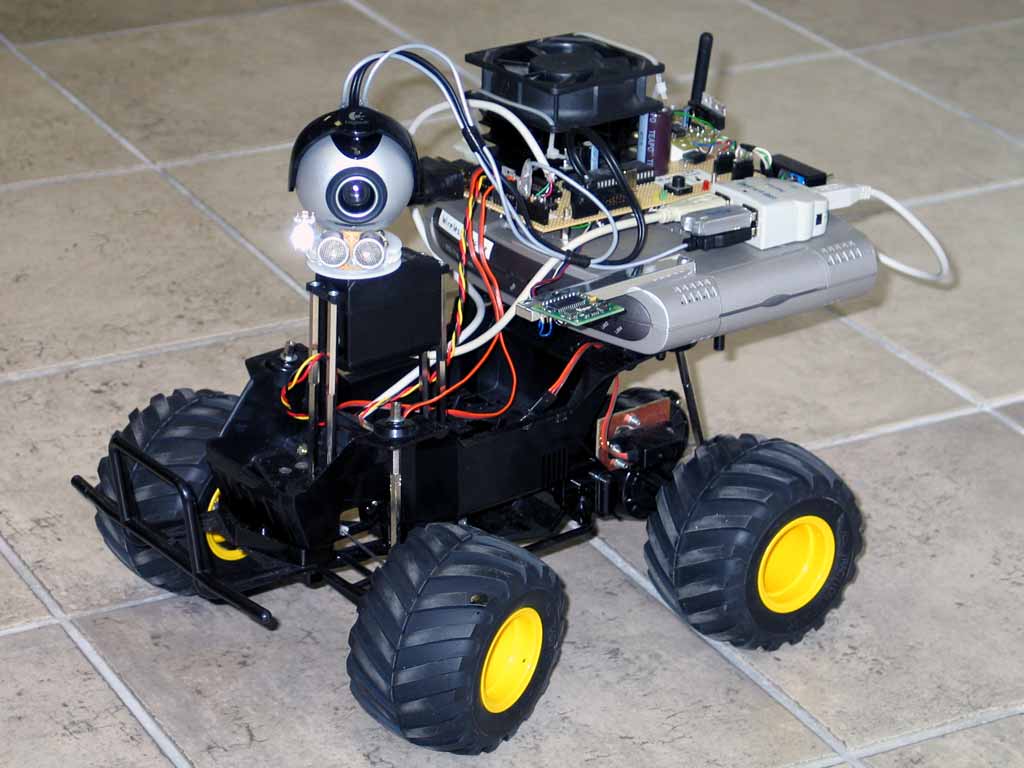
Robot Mobil atau Mobile Robot adalah konstruksi robot yang ciri khasnya adalah mempunyai aktuator berupa roda untuk menggerakkan keseluruhan badan robot tersebut, sehingga robot tersebut dapat melakukan perpindahan posisi dari satu titik ke titik yang lain. Robot mobil ini sangat disukai bagi orang yang mulai mempelajari robot. Hal ini karena membuat robot mobil tidak memerlukan kerja fisik yang berat. Untuk dapat membuat sebuah robot mobile minimal diperlukan pengetahuan tentang mikrokontroler dan sensor-sensor elektronik.Base robot mobil dapat dengan mudah dibuat dengan menggunakan plywood /triplek, akrilik sampai menggunakan logam ( aluminium ). Robot mobil dapat dibuat sebagai pengikut garis ( Line Follower ) atau pengikut dinding ( Wall Follower ) ataupun pengikut cahaya.
Robot Mobil atau Mobile Robot adalah konstruksi robot yang ciri khasnya adalah mempunyai aktuator berupa roda untuk menggerakkan keseluruhan badan robot tersebut, sehingga robot tersebut dapat melakukan perpindahan posisi dari satu titik ke titik yang lain. Robot mobil ini sangat disukai bagi orang yang mulai mempelajari robot. Hal ini karena membuat robot mobil tidak memerlukan kerja fisik yang berat. Untuk dapat membuat sebuah robot mobile minimal diperlukan pengetahuan tentang mikrokontroler dan sensor-sensor elektronik.Base robot mobil dapat dengan mudah dibuat dengan menggunakan plywood /triplek, akrilik sampai menggunakan logam ( aluminium ). Robot mobil dapat dibuat sebagai pengikut garis ( Line Follower ) atau pengikut dinding ( Wall Follower ) ataupun pengikut cahaya.
b.
Robot jaringan
Robot jaringan adalah pendekatan baru untuk melakukan kontrol robot menggunakan jaringan internet dengan protokol TCP/IP. Perkembangan robot jaringan dipicu oleh kemajuan jaringan dan internet yang pesat. Dengan koneksi jaringan, proses kontrol dan monitoring, termasuk akuisisi data bila ada, seluruhnya dilakukan melalui jaringan. Keuntungan lain, koneksi ini bisa dilakukan secara nirkabel.Di Indonesia, pengembang robot jaringan belum banyak, meski pengembang dan komunitas robot secara umum sudah banyak. Hal ini disebabkan tuntutan teknis yang jauh lebih kompleks. Salah satu robot jaringan yang sudah berhasil dikembangkan adalah LIPI Wireless Robot (LWR) yang dikembangkan oleh Grup Fisika Teoritik dan Komputasi– GFTK LIPI.Seperti ditunjukkan di LWR, seluruh proses kontrol dan monitoring bisa dilakukan melalui perambah internet. Lebih jauh, seluruh sistem dan protokol yang dikembangkan untuk LWR ini telah dibuka sebagai open-source dengan lisensi GNU Public License (GPL) di SourceForge dengan nama openNR.
Robot jaringan adalah pendekatan baru untuk melakukan kontrol robot menggunakan jaringan internet dengan protokol TCP/IP. Perkembangan robot jaringan dipicu oleh kemajuan jaringan dan internet yang pesat. Dengan koneksi jaringan, proses kontrol dan monitoring, termasuk akuisisi data bila ada, seluruhnya dilakukan melalui jaringan. Keuntungan lain, koneksi ini bisa dilakukan secara nirkabel.Di Indonesia, pengembang robot jaringan belum banyak, meski pengembang dan komunitas robot secara umum sudah banyak. Hal ini disebabkan tuntutan teknis yang jauh lebih kompleks. Salah satu robot jaringan yang sudah berhasil dikembangkan adalah LIPI Wireless Robot (LWR) yang dikembangkan oleh Grup Fisika Teoritik dan Komputasi– GFTK LIPI.Seperti ditunjukkan di LWR, seluruh proses kontrol dan monitoring bisa dilakukan melalui perambah internet. Lebih jauh, seluruh sistem dan protokol yang dikembangkan untuk LWR ini telah dibuka sebagai open-source dengan lisensi GNU Public License (GPL) di SourceForge dengan nama openNR.

c.
Robot Manipulator ( tangan )
Robot ini hanyak memiliki satu tangan seperti tangan manusia yang fungsinya untuk memegang atau memindahkan barang, contoh robot ini adalah robot las di Industri mobil, robot merakit elektronik.
Robot ini hanyak memiliki satu tangan seperti tangan manusia yang fungsinya untuk memegang atau memindahkan barang, contoh robot ini adalah robot las di Industri mobil, robot merakit elektronik.

d. Robot Humanoid
Robot yang memiliki kemampuan menyerupai manusia, baik fungsi maupun cara
bertindak, contoh robot ini adalah Ashimo yang dikembangkan oleh Honda. Robot
adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik menggunakan
pengawasan dan kontrol manusia, ataupun menggunakan program yang telah
didefinisikan terlebih dulu (kecerdasan buatan). Robot biasanya digunakan untuk
tugas yang berat, berbahaya, pekerjaan yang berulang dan kotor. Biasanya
kebanyakan robot industri digunakan dalam bidang produksi. Penggunaan robot
lainnya termasuk untuk pembersihan limbah beracun, penjelajahan bawah air dan
luar angkasa, pertambangan, pekerjaan “cari dan tolong” (search and rescue),
dan untuk pencarian tambang. Belakangan ini robot mulai memasuki pasaran
konsumen di bidang hiburan, dan alat pembantu rumah tangga, seperti penyedot
debu, dan pemotong rumput.

4. Contoh-contoh Sistem Kontrol Pada Robot
Membuat
robot tak lepas dari namanya sistem kontrol. Yang umum dipakai ada 3, yaitu:
1. ON-OFF
2. PID
3. Penerapan Soft Computing
Sistem kontrol digunakan untuk mengontrol pergerakan / navigasi robot. Kita ambil contoh robot line follower. Misal kita ingin menerapkan sistem kontrol ON-OFF pada robot dengan 2 sensor garis. Sistem kontrol yang diterapkan adalah switching aktuator (motor DC) ON dan OFF berdasarkan kondisi sensor kiri dan kanan, yaitu set motor kanan ON dan motor kiri OFF saat sensor kiri mendapatkan garis, demikian sebaliknya untuk sensor kanan. Pergerakan akan terlihat zigzag jika hanya menggunakan dua sensor ini dan hanya diterakan sistem kontrol ON-OFF.
Dengan menerapkan sistem kontrol PID kita bisa memperbaiki pergerakan robot menjadi lebih smooth. Sistem kontrol PID adalah mekanisme umpan balik berulang tertutup. Kontrol PID digunakan untuk mengkoreksi error dari pengukuran variabel proses (dalam kasus ini adalah sensor) agar output sistem sesuai dengan nilai set point melalui perhitungan parameter Proportional (P) + Integral (I) + Derivative (I). Silahkan googling dan wikiing untuk mengetahui PID lebih jauh. Contoh kasus penerapan PID pada robot line follower bisa di baca di sini. Dadank juga pernah membuat robot semar mesem dengan penerapan PID sederhana, silahkan tilik di sini. Sedangkan penerapan soft computing bisa berupa fuzzy logic dan NN (dua ini yang lazim digunakan untuk KRCI). Penerapan soft computing cocok untuk granular data yang kompleks, misal data dari banyak sensor ultrasonic untuk mengontrol aktuator. Jika mapping data sensor dengan PWM motor dengan cara sederhana sudah tidak bisa diterapkan, maka penerapan “komputasi halus” perlu diterapkan. Untuk masalah soft computing lebih spesifik mungkin bisa dibahas dithread selanjutnya.
1. ON-OFF
2. PID
3. Penerapan Soft Computing
Sistem kontrol digunakan untuk mengontrol pergerakan / navigasi robot. Kita ambil contoh robot line follower. Misal kita ingin menerapkan sistem kontrol ON-OFF pada robot dengan 2 sensor garis. Sistem kontrol yang diterapkan adalah switching aktuator (motor DC) ON dan OFF berdasarkan kondisi sensor kiri dan kanan, yaitu set motor kanan ON dan motor kiri OFF saat sensor kiri mendapatkan garis, demikian sebaliknya untuk sensor kanan. Pergerakan akan terlihat zigzag jika hanya menggunakan dua sensor ini dan hanya diterakan sistem kontrol ON-OFF.
Dengan menerapkan sistem kontrol PID kita bisa memperbaiki pergerakan robot menjadi lebih smooth. Sistem kontrol PID adalah mekanisme umpan balik berulang tertutup. Kontrol PID digunakan untuk mengkoreksi error dari pengukuran variabel proses (dalam kasus ini adalah sensor) agar output sistem sesuai dengan nilai set point melalui perhitungan parameter Proportional (P) + Integral (I) + Derivative (I). Silahkan googling dan wikiing untuk mengetahui PID lebih jauh. Contoh kasus penerapan PID pada robot line follower bisa di baca di sini. Dadank juga pernah membuat robot semar mesem dengan penerapan PID sederhana, silahkan tilik di sini. Sedangkan penerapan soft computing bisa berupa fuzzy logic dan NN (dua ini yang lazim digunakan untuk KRCI). Penerapan soft computing cocok untuk granular data yang kompleks, misal data dari banyak sensor ultrasonic untuk mengontrol aktuator. Jika mapping data sensor dengan PWM motor dengan cara sederhana sudah tidak bisa diterapkan, maka penerapan “komputasi halus” perlu diterapkan. Untuk masalah soft computing lebih spesifik mungkin bisa dibahas dithread selanjutnya.
• Autonomous Robot System-ARS
Untuk membiarkan sistem robot mandiri (ARS) bekerja pada dunia nyata, kontrol dan sistem sensor harus memperhatikan tantangan yang diakibatkan oleh keitdakpastian observasi terhadap lingkungan dan kondisi tugasnya. Oleh karena itu, harus diperhatikan seberapa jauh kebutuhan sistem kontrol yang akan digunakan untuk mendesaian sistem robot mandiri. Ada beberapa aspek yang harus diperhatikan, diantaranya :
•
Sistem kontrol robot bersifat sensor driven
Satu masalah yang dihadapi pada lingkungan yang tidak terstruktur adalah tidak mungkin memperkirakan hasil dari tiap aksi secara tepat. Kondisi ini juga menunjukkan sedikitnya kemungkinan menemukan deret aksi yang akan memecahkan tugas yang diberikan berdasarkan semua kemungkinan yang telah diperhitungkan sebelumnya.
Oleh karena itu sistem kontrol robot harus dikendalikan sensor(sensor driven) dan mengijinkan robot untuk bereaksi terhadap kejadian (event) yang tidak diharapkan secara on line. Pendekatan kontrol reaktif seperti ini dapat menjadi robust dengan mempertimbangkan gangguan yang terbatas dan dapat memperbaiki diri secara mandiri terhadap gangguan yang tak dapat dimodelkan tanpa memerlukan perencanaan ulang. Hal ini memberikan respon level rendah yang lebih fleksibel terhadap situasi baru dan mengijinkan robot untuk melakukan tugas pada konsidi munculnya noise pada sensor dan terjadinya perubahan kondisi lingkungan.
Satu masalah yang dihadapi pada lingkungan yang tidak terstruktur adalah tidak mungkin memperkirakan hasil dari tiap aksi secara tepat. Kondisi ini juga menunjukkan sedikitnya kemungkinan menemukan deret aksi yang akan memecahkan tugas yang diberikan berdasarkan semua kemungkinan yang telah diperhitungkan sebelumnya.
Oleh karena itu sistem kontrol robot harus dikendalikan sensor(sensor driven) dan mengijinkan robot untuk bereaksi terhadap kejadian (event) yang tidak diharapkan secara on line. Pendekatan kontrol reaktif seperti ini dapat menjadi robust dengan mempertimbangkan gangguan yang terbatas dan dapat memperbaiki diri secara mandiri terhadap gangguan yang tak dapat dimodelkan tanpa memerlukan perencanaan ulang. Hal ini memberikan respon level rendah yang lebih fleksibel terhadap situasi baru dan mengijinkan robot untuk melakukan tugas pada konsidi munculnya noise pada sensor dan terjadinya perubahan kondisi lingkungan.
•
Arsitektur kontrol yang adpatif
Untuk mengatasi perubahan yang besar pada lingkungan saat run-time sebagaimana juga perubahan pada misi/tugas yang terus menerus, ARM harus mampu mengubah kebijakan kontrolnya untuk menyesuaikan dengan semua kondisi baru. Secara umum, hal ini membutuhkan arsitekrut sistem kontrol adapatif. Bergantung pada kondisi operasi, variasi yang luas dari mekanisme machine-learning dapat digunakan untuk melakukan adaptasi. Pada misi yang mengijinkan pengawasan oleh operator luar, metode pengajaran dapat dilakukan dan juga dengan memodifikasi strategi kontrol yang telah diprogram sebelumnya untuk melakukan tugas yang diperlukan. Namun, pada banyak aplikasi diluar, guidance tidak tersedia. Pada situasi ini, sistem belajar mandir yang lebih baik sehingga strategi kontrol dapat menyesuaikan dengan kontek lingkungan tanpa masukan guru. Aplikasi yang seperti ini, berkisar dari aplikasi di daerah terpencil atau lingkungan berbahaya yang tidak memfasilitasi kehadiran manusia, sampai pada aplikasi untuk urusan rumah tangga yang bekerja sesuai dengan keinginan pemilik tanpa melakukan akses ke robot yang telah dilatih oleh operator/guru.
Untuk mengatasi perubahan yang besar pada lingkungan saat run-time sebagaimana juga perubahan pada misi/tugas yang terus menerus, ARM harus mampu mengubah kebijakan kontrolnya untuk menyesuaikan dengan semua kondisi baru. Secara umum, hal ini membutuhkan arsitekrut sistem kontrol adapatif. Bergantung pada kondisi operasi, variasi yang luas dari mekanisme machine-learning dapat digunakan untuk melakukan adaptasi. Pada misi yang mengijinkan pengawasan oleh operator luar, metode pengajaran dapat dilakukan dan juga dengan memodifikasi strategi kontrol yang telah diprogram sebelumnya untuk melakukan tugas yang diperlukan. Namun, pada banyak aplikasi diluar, guidance tidak tersedia. Pada situasi ini, sistem belajar mandir yang lebih baik sehingga strategi kontrol dapat menyesuaikan dengan kontek lingkungan tanpa masukan guru. Aplikasi yang seperti ini, berkisar dari aplikasi di daerah terpencil atau lingkungan berbahaya yang tidak memfasilitasi kehadiran manusia, sampai pada aplikasi untuk urusan rumah tangga yang bekerja sesuai dengan keinginan pemilik tanpa melakukan akses ke robot yang telah dilatih oleh operator/guru.
•
Memenuhi batasan keamanan
Spesifikasi dasar untuk arsitektur kontrol untuk keperluan ARS adalah ia memenuhi batasan keamanan tertentu untuk menghindari kegagalan besar dan tak dapat diperbaiki. Hal ini khususnya penting ketika tugas baru dilatihkan tanpa pengawasan dan ketika pengaruh perbedaan aksi harus ditentukan melaui uji coba. Namun, mekansime untuk memenuhi kebutuhan keamanaa dapat dimanfaatkan untuk sistes teleoperasi yang besar yang dapat membantu mengurangi resiko kerusakan dan kegagalan menyeluruh karena kesalahan operator. Arsitektur kontrol untuk sistem robot seyogyanya menyediakan mekanisme yang membatasi sistem behavior agar dapat mengakomodasi kebutuhan keamanan dan kekokohan. Oleh kerena itulah dibituhkan sarana/alat yang dapat membatasi proses belajar dengan tujuan untuk menghindari aksi yang dapat mengganggu sifat-sifat kritis dari sistem behavior.
Spesifikasi dasar untuk arsitektur kontrol untuk keperluan ARS adalah ia memenuhi batasan keamanan tertentu untuk menghindari kegagalan besar dan tak dapat diperbaiki. Hal ini khususnya penting ketika tugas baru dilatihkan tanpa pengawasan dan ketika pengaruh perbedaan aksi harus ditentukan melaui uji coba. Namun, mekansime untuk memenuhi kebutuhan keamanaa dapat dimanfaatkan untuk sistes teleoperasi yang besar yang dapat membantu mengurangi resiko kerusakan dan kegagalan menyeluruh karena kesalahan operator. Arsitektur kontrol untuk sistem robot seyogyanya menyediakan mekanisme yang membatasi sistem behavior agar dapat mengakomodasi kebutuhan keamanan dan kekokohan. Oleh kerena itulah dibituhkan sarana/alat yang dapat membatasi proses belajar dengan tujuan untuk menghindari aksi yang dapat mengganggu sifat-sifat kritis dari sistem behavior.
•
Kemampuan Belajar
Sifat arsitektur yang lain yang mendukung autonomy dan adaptasi adalah kemampuan untuk menggabungkan pengatahuan awal atau pengetahuan yang diperoleh untuk mempercepat proses belajar. Untuk membuat adaptasi mandiri lebih praktis, pembelajaran harus menghasilkan kebijakan sensorimotor yang bermanfaat untuk sebagian besar tugas. Untuk mencapai efisiensi dan fleksibiltas yang demikian, arsitektur kontrol haurs mengijinkan robot untuk memperoleh keuntungan dari semua informasi luar yang tersedia pada kontek tertentu.
Penggunaan yang efektif dari pengetahuan kontrol luar dapat menghasilkan mode operasi yang berbeda. Khususnya, jika pengetahuan awal tersedia cukup, dimungkinkan untuk menentukan kebijakan kontrol yang tepat sebelumnya, mengurangi kebutuhan belajar secara on-line. Jika tidak ada informasi yang tersedia, arsitektur kontrol harus mampu menentukan kebijakan kontrol secara mandiri (autonomously). Untuk sepenuhnya menggunakan pengetahuan kontrol, sistem kontrol seharunya mendukung operasi pada berbagai tingkatan otonomi, dari terprogram penuh yang perilakunya sebagain dikendalikan oleh operator sampai ke otonomi penuh, berjalan secara bebas, terbebas dari intervensi.
Sifat arsitektur yang lain yang mendukung autonomy dan adaptasi adalah kemampuan untuk menggabungkan pengatahuan awal atau pengetahuan yang diperoleh untuk mempercepat proses belajar. Untuk membuat adaptasi mandiri lebih praktis, pembelajaran harus menghasilkan kebijakan sensorimotor yang bermanfaat untuk sebagian besar tugas. Untuk mencapai efisiensi dan fleksibiltas yang demikian, arsitektur kontrol haurs mengijinkan robot untuk memperoleh keuntungan dari semua informasi luar yang tersedia pada kontek tertentu.
Penggunaan yang efektif dari pengetahuan kontrol luar dapat menghasilkan mode operasi yang berbeda. Khususnya, jika pengetahuan awal tersedia cukup, dimungkinkan untuk menentukan kebijakan kontrol yang tepat sebelumnya, mengurangi kebutuhan belajar secara on-line. Jika tidak ada informasi yang tersedia, arsitektur kontrol harus mampu menentukan kebijakan kontrol secara mandiri (autonomously). Untuk sepenuhnya menggunakan pengetahuan kontrol, sistem kontrol seharunya mendukung operasi pada berbagai tingkatan otonomi, dari terprogram penuh yang perilakunya sebagain dikendalikan oleh operator sampai ke otonomi penuh, berjalan secara bebas, terbebas dari intervensi.
DAFTAR PUSTAKA
Agfianto
Eko Putra. (2005). Pengendalian Mobile
Robot (Mobot) dengan MOBOTSIM v1.0. Yogyakarta
: Gava Media
Dosen
Elektronika POLBAN. (2006). Modul
Pelatihan Robot Cerdas Pemadam Api. Bandung: Politeknik Negeri Bandung.
Komentar
Posting Komentar